Bézier Motion Interpolation
(Parouty, Larochelle)
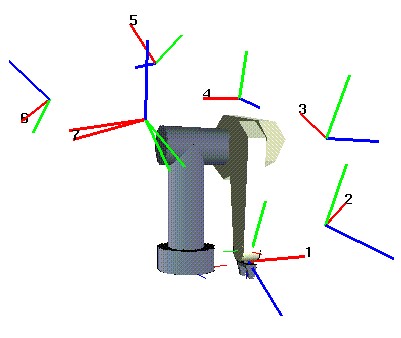
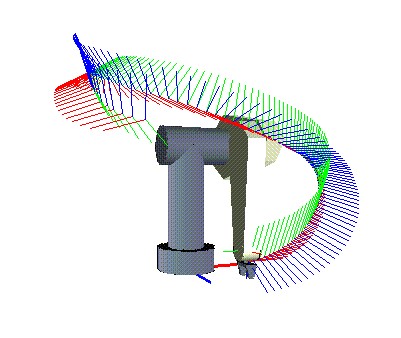
This research effort applied Bézier motion interpolation and computer graphics methods to robotic trajectory generation. This software tool enables the user to reconstruct the desired industrial scenario in a computer environment to generate practical trajectories for robots. Our experience with the design of robotic trajectories has demonstrated the need for the trajectory designer to be able to visualize the motion problem in three dimensions and enabling the designer to take a visual approach to solving the problem. Through a comprehensive user interface and efficient computational algorithms our software enables the designer to easily define a precise motion task for any robot and create a smooth and practical trajectory with a click of a button. To illustrate our work on motion interpolation we developed a specialized version of our trajectory planning software for the popular PUMA 560 robot arm. This version of the software allows the user to create trajectories for the PUMA 560 and actually visualize the robot following the interpolated motion.