Intelligent Ground Vehicle
An autonomous mobile robot (Bishnoi, Larochelle)
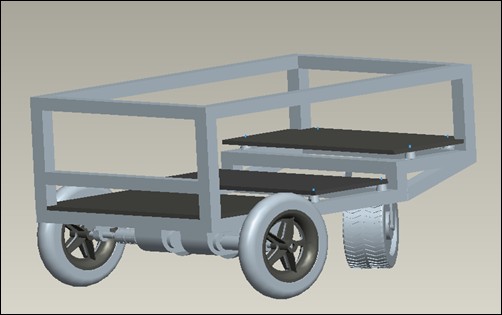
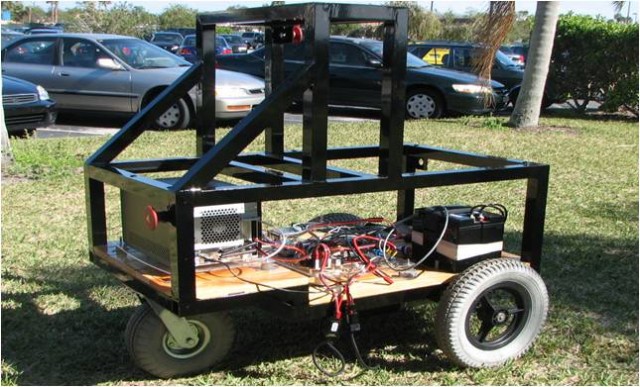
This project began as a capstone (i.e. senior) design project. The goal was to create an autonomously navigated vehicle to be entered into the Intelligent Ground Vehicle Competition (IGVC). The IGVC is an engineering challenge in which the main goal is to design a robot that has enough artificial intelligence to autonomously navigate through a course full of obstacles such as barrels, pot holes, and sand traps. The robot is equipped with a SICK LMS 291 laser range finder (lidar), a digital compass, a Hemisphere Eclipse digital global positioning systems (gps), stereo cameras, an Intel Core 2 Quad 2.83 GHz pc with a solid-state drive, an ARM 7 Cortex M3 sub processor, two 25 (Amp) drive servos with encoder feedback, and a 24V (dc) supply for up to 2 hours of autonomous operation.