PantherBot
A general purpose mobile robot platform for autonomous navigation and teleoperation.
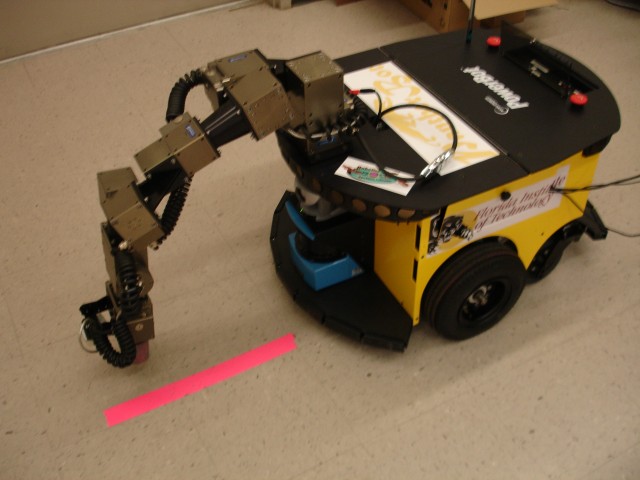
The PantherBot is built on a MobileRobotsTM PowerBot mobile robot platform equipped with a laser navigation system and a Schunk 6-DOF robot arm. The PantherBot is equipped with: a 6 degree of freedom robot arm manufactured by Schunk Inc. with a reach of 1 (m) and a payload capacity of 3 (kg), a SICK laser rangefinder, 21 sonar collision sensors, two video cameras, 802.11b WiFi, and two on-board PC's running Linux. The PantherBot base has the ability to autonomously map terrain and perform SLAM (Simultaneous Localization And Mapping). The system can also stream live footage from the PantherBot’s two cameras mounted on-board; one on the PantherBot’s base, the other adjacent to the parallel gripper on the robotic arm to monitor the arm’s movements remotely over 802.11b WiFi.
PantherBot Tools (Tai, Rae, Nunn, Larochelle)
The goal of the PantherBot Tools project was to design tools and
related hardware and software to provide our mobile robot PantherBot with the capability to open doors and press wall panel buttons
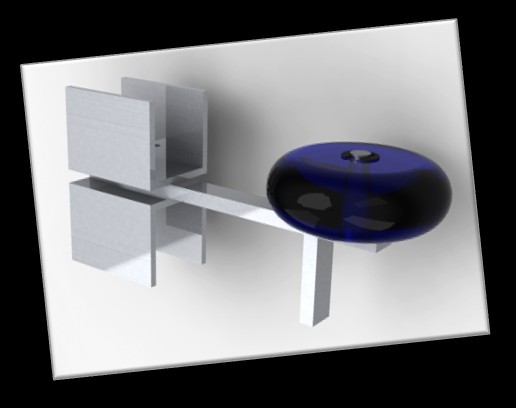
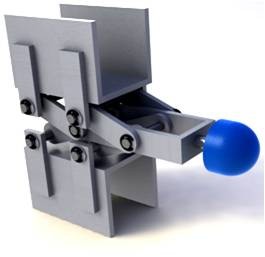
so that it can roam autonomously inside the F. W. Olin Engineering Complex. The project resulted in the design of two novel tools:
the Prod and the Enterprise. The Prod is used to press wall panel buttons while the Enterprise is used to rotate door handles and
open doors.