Gripper
Parallel Jaw End-Effector with Force Control (Caballero, Larochelle)
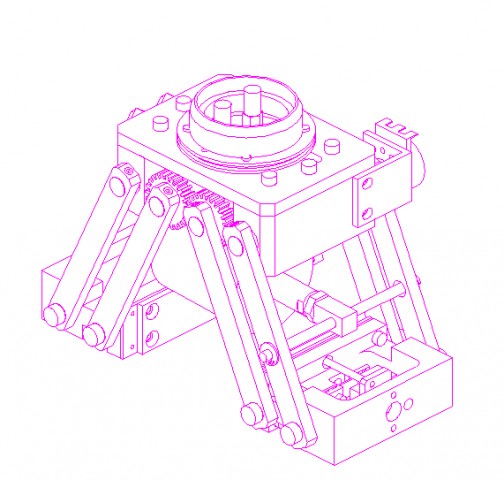
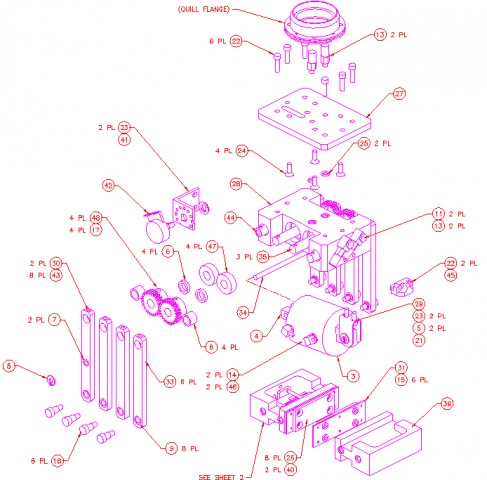
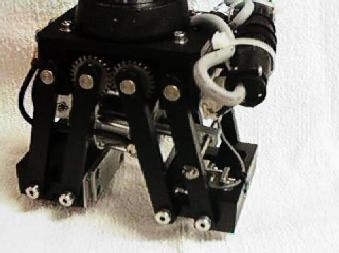
A force controlled parallel jaw gripper was designed for use in RASSL's robotic systems. This end-effector is powered by a pneumatic cylinder which is controlled by a microcontroller through an electro-pneumatic regulator. The result is a parallel jaw gripper that is able to apply a gripping force of up to 15(lbs.) that is utilized to support both the research and educational activities of the Lab.