Collision Detection
Self Collsion Detection in Spatial Robotic Mechanical Systems (Ketchel, Larochelle)
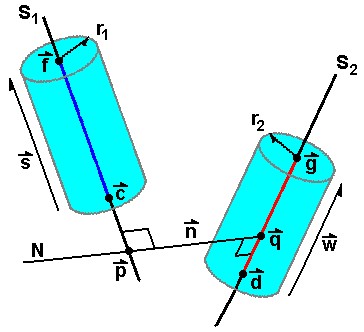
The methodology developed detects collisions of cylindrically shaped rigid bodies moving in three dimensions. The algorithm utilizes line geometry and dual number algebra. The rigid bodies are modeled with infinite cylinders and the condition for a collision is evaluated. If the condition is not satisfied, then the two bodies do not collide. If the condition is satisfied, the algorithm continues. The bodies are then modeled with finite cylinders. Another algorithm is followed and results in an efficient way of detecting collisions in three dimensional motion.
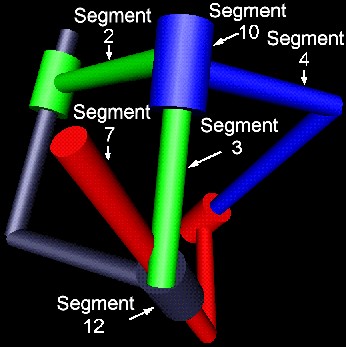
Lines are used to define the locations of finite cylinders in three-dimensions and line geometry is then used to determine if cylinders collide or interfere with each other.
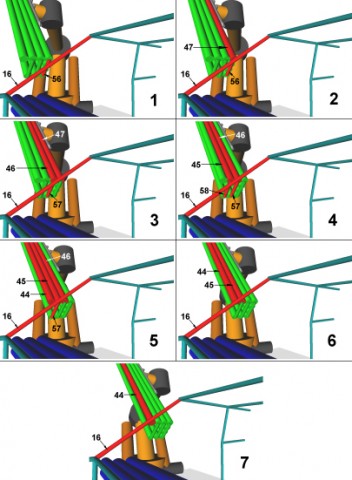
Our collision detection algorithm has been utilized to detect self-collisions in a spatial 4C robotic mechanism as well as in motion planning for an industrial robot installing a dashboard into a car frame on an automobile assembly line.