SPASUR
SPAtial SURfaces of the 4C Mechanism (Agius, Larochelle)
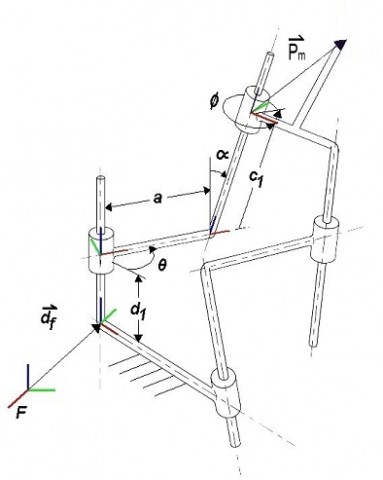
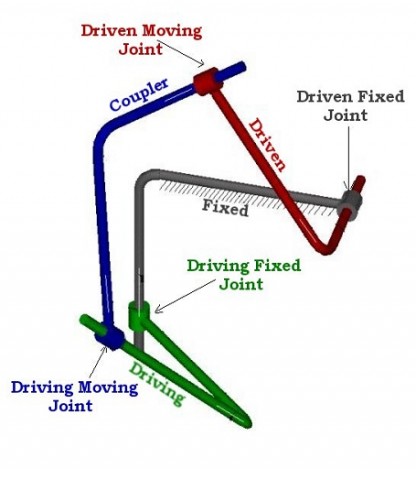
SPASUR is a program written to generate parametric representations of the coupler surfaces of spatial 4C mechanisms and to provide interactive visualization of these surfaces. Spatial 4C mechanisms are two degree of freedom closed-chains. Hence, the available motion of any given coupler point is a three-dimensional surface. We have shown the coupler surfaces of spatial 4C mechanisms are straight line ruled surfaces with directrices of 16th degree.
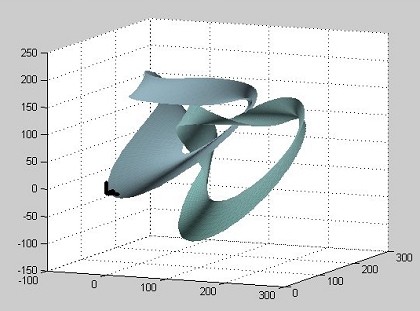
The coupler surface is the set of all points reachable by a point attached to the coupler of the mechanism. Here, the MATLAB implementation of SPASUR shows the coupler surfaces of a crank-rocker spatial 4C mechanism. Finally, our implementation of SPASUR into our VRSpatial immersive virtual reality design environment is shown. Visualizations of the coupler surfaces have proven very useful in designing spatial mechanisms.