Spatial 4C Prototype
Spatial 4C Mechanism Prototype (Ustun, Agius, Larochelle)
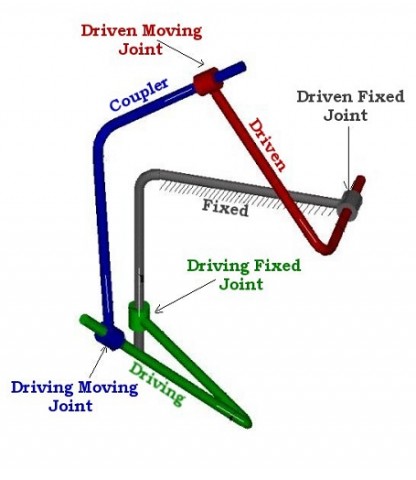
A prototype spatial 4C mechanism was designed and prototyped. A spatial 4C mechanism is a two degree of freedom closed chain consisting of 4 links connected serially via cylindrical (C) joints where a cylindrical (C) joint is a two degree of freedom joint allowing rotation and/or translation about a line in space. Spatial 4C mechanisms are the three-dimensional analog of the common planar four-bar mechanism. But, a significant difference exists between the spatial 4C and planar four-bar mechanisms. Whereas planar four-bar mechanisms are restricted to moving in a two-dimensional plane, spatial 4C mechanisms are capable of generating motions and/or force transmissions in general three-dimensional space. Yet, these mechanisms only require the actuation and control of two degrees of freedom whereas typical industrial robots have 6 or more joints that are actively controlled to generate three-dimensional motions. RASSL is working to develop novel tools to facilitate the design and implementation of these exciting robotic mechanisms.