SphereWalker
A Hexapod Walking Machine Actuated by Spherical Four-Bar Mechanisms
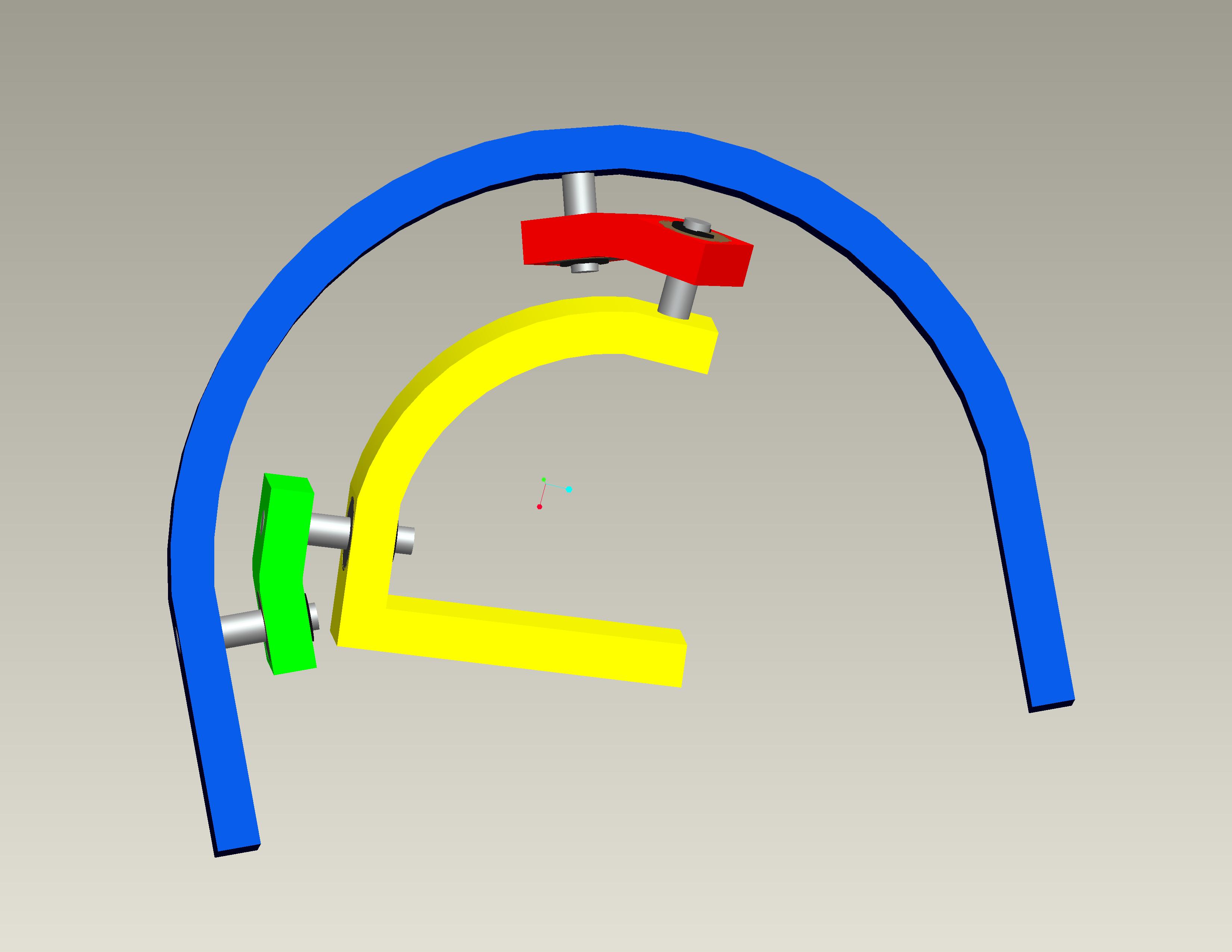
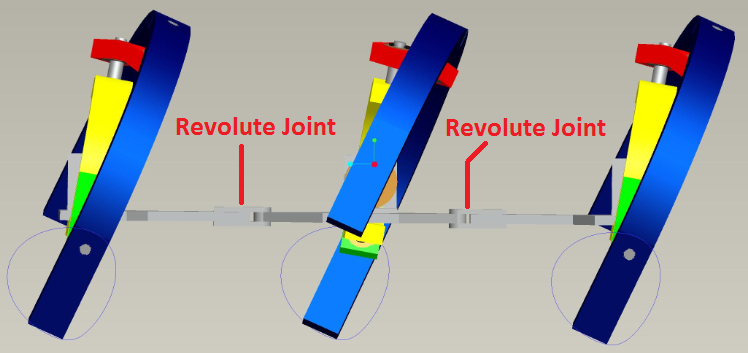
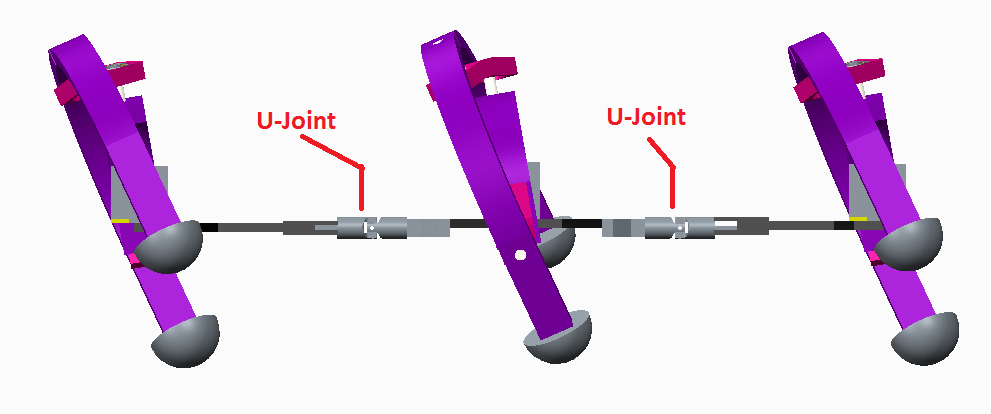
SphereWalker (U.S. Patent #9162721, 10/20/2015) is a hexapod walking machine whose leg pairs are actuated by novel spherical four-bar mechanisms. The innovative actuating mechanism is a single degree of freedom (DOF) crank-rocker spherical four-bar mechanism whose coupler link is extended such that each end of the link supports one of SphereWalker's feet. Three identical mechanisms are used in the device; each driving a pair of legs of the hexapod. Traditionally each leg of a hexapod is driven by multiple actuators. Here, by using a single mechanism to drive a pair of legs only three actuators are needed to drive all six of SphereWalker's legs. Thereby reducing cost, weight, and complexity. Our expectation is that real-world testing will verify that SphereWalker is capable of effectively and efficiently navigating challenging terrain and in an energy efficient manner.
Ongoing efforts are adding autonomous operation, wireless communications, and a sensor package to SphereWalker. Moreover, experiments are being conducted to study various gaits in a variety of operating conditions.