Sphinx
Designing Spherical Four-Bar (4R) Mechanisms (Larochelle, McCarthy, Murray, Bodduluri, Dooley)
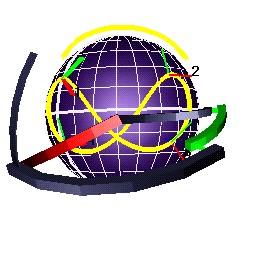
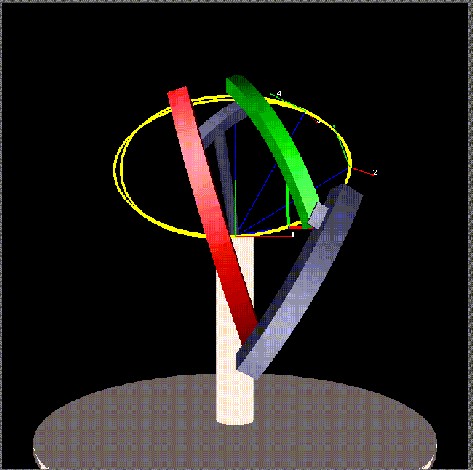
SPHINX is an interactive graphics based software package for designing spherical mechanisms. The program provides a platform for the synthesis of a spherical four-bar mechanism that guides a body through either three or four prescribed orientations in space. A spherical four-bar mechanism consists of four links connected by revolute(R) or hinge joints. The single degree of freedom R joints in a spherical mechanism allow relative rotation about arbitrary lines in space. This differentiates spherical 4R mechanisms from common planar four-bar mechanisms which consit of four links connected by revolute(R) joints whose lines are all parallel. The goal in creating SPHINX was to assemble the current spherical 4R synthesis and analysis theory into a software package that is useful for spherical mechanism design and research. SPHINX runs on Silicon Graphics platforms running the IRIX operating system.
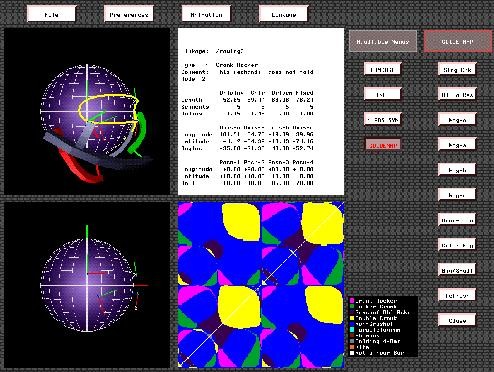
The Sphinx design environment is made up of four unique windows. The window in the upper-left displays the spherical links. The links may be animated in this window. The window in lower-left diplays the position synthesis. The four orientations can be changed in this window. The window in the upper-right shows all position and link information. The link radii and orientations can be changed in this window simply by keying the appropriate information. The window in the lower-right shows the guide map. The guide map displays all possible solutions for the four orientations given. Unusable solutions may be eliminated by using the sigularity check option.