TORUS
Time Optimal Robot Systems (Larochelle, McCarthy, Bobrow)
TORUS(Time-Optimal Robot systemS) is a numerical optimal control package coupled with a computer graphics interface. At the heart of TORUS is a time-optimal control strategy which interacts with a nonlinear optimization package to determine the dynamic performance limits of robotic systems. The result is that the designer is able to evaluate with respect to practical dynamic criteria the design of a robotic system. Some of the dynamic performance criteria that are easily determined for a prescribed task with TORUS include: determining the maximum dynamic payload, determining the minimum time required to complete the task, determining the performance benefits of having two or more robots cooperate to accomplish the task, and evaluating the dynamic effects of different grasps on the workpiece.
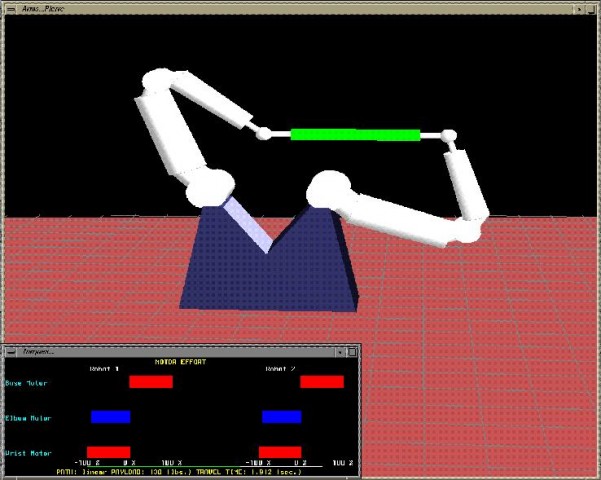
Shown above are two cooperating Odetics robot arms moving a workpiece(green). The time to accomplish the task, the maximum payload, and the current motor torques as a percentage of their maximum output are shown in the lower left display window.